super projet
merci de le déterrer, j'ai suivi sans participer, n'ayant pas les compétences pour t'aider bien malgré moi.
pour le budget tu t'en sors pas si mal, j'en ai vu qui avait explosé les 100k€ entre le matériel d'usinage et les matériaux.
Réalisation d\'un robot à chenilles
-
merlin2000fr

- Messages : 2140
- Inscription : ven. 12 janv. 2018 17:44
Re: Réalisation d\'un robot à chenilles
Un petit aperçu du châssis actuel :
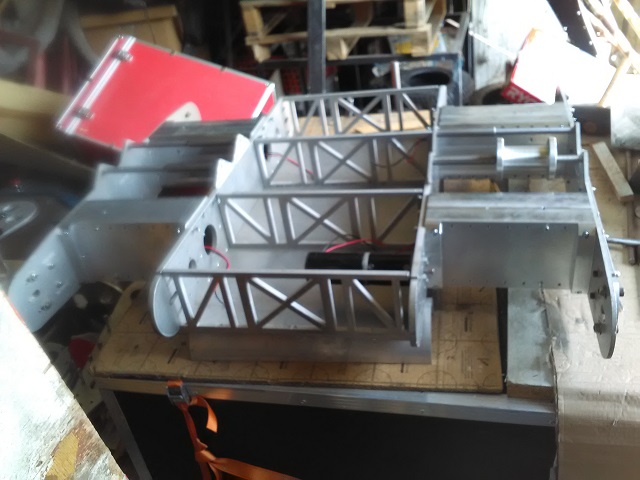
Largeur : 98cm.

Le fligthcase mesure 1m en interne.

Les rollers pour les chenilles ne sont pas montés parce qu'avec deux mois de retard sur l'usinage je n'ai pas encore les pièces (j'espère le coup de fil avant la fin de la semaine).
Les nouveaux barbotins ne sont pas montés parce que je n'avais toutes la visserie et j'ai un peu de mal à me retrouver dans le calage du bras.
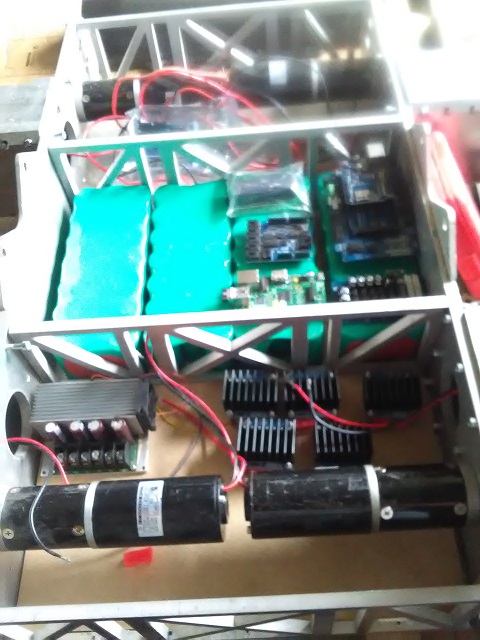
Une vue de l'intérieur avec carte driver pour piloter les 4 moteurs de propulsion, les drivers pour les moteurs des articulations des bras dans le premier compartiment.
Dans le second compartiment il y a les 4 batteries pour la propulsion et l'électronique de commande : une Arduino MEGA+shields, une Arduino Uno+ shield, un RPi (en option), une carte 4 relais (peut-être remplacée par une carte 8 relais) et une carte de distribution d'énergie (elle va être fixée sur une autre carte électronique pour gérer les 6 batteries actuellement en conception.
Finalement je pense placer le routeur dans ce compartiment plutôt que le troisième à cause des moteurs.
Le troisième compartiment va recevoir une ou deux batteries pour l'électronique de commande et tout les raccord pour ces batteries
L'intérieur va recevoir des plaque d'alu pour fixer toute l'électronique :

Je les ai coupé samedi soir, je n'ai pas eu le temps de les percer.
On ne voit que les moteurs d'articulation des bras parce que les moteurs de propulsion sont logés dans les gros bloc alu que l'on voit sur la première photo (les passages de chaine n'ont pas été percés, ce sera fait après mise en place des barbotins et chaines).
J'ai encore du boulot pour le terminer mais il doit rouler avant le 22 septembre de cette année rouler ne veut pas dire finit. J'espère continuer dans cette voie et le terminer avant la fin de l'année sauf la nacelle pour la caméra (qui remplace l'APN prévue initialement).
La télécommande est partiellement modélisée et imprimée (enfin un proto vu la réussite de ma première impression 3D), j'avais du mettre des photos dans le sujet d'impression 3D.
Je rappel que je sui près à recevoir vos conseille pour la caméra du pilote.
Largeur : 98cm.
Le fligthcase mesure 1m en interne.
Les rollers pour les chenilles ne sont pas montés parce qu'avec deux mois de retard sur l'usinage je n'ai pas encore les pièces (j'espère le coup de fil avant la fin de la semaine).
Les nouveaux barbotins ne sont pas montés parce que je n'avais toutes la visserie et j'ai un peu de mal à me retrouver dans le calage du bras.
Une vue de l'intérieur avec carte driver pour piloter les 4 moteurs de propulsion, les drivers pour les moteurs des articulations des bras dans le premier compartiment.
Dans le second compartiment il y a les 4 batteries pour la propulsion et l'électronique de commande : une Arduino MEGA+shields, une Arduino Uno+ shield, un RPi (en option), une carte 4 relais (peut-être remplacée par une carte 8 relais) et une carte de distribution d'énergie (elle va être fixée sur une autre carte électronique pour gérer les 6 batteries actuellement en conception.
Finalement je pense placer le routeur dans ce compartiment plutôt que le troisième à cause des moteurs.
Le troisième compartiment va recevoir une ou deux batteries pour l'électronique de commande et tout les raccord pour ces batteries
L'intérieur va recevoir des plaque d'alu pour fixer toute l'électronique :
Je les ai coupé samedi soir, je n'ai pas eu le temps de les percer.
On ne voit que les moteurs d'articulation des bras parce que les moteurs de propulsion sont logés dans les gros bloc alu que l'on voit sur la première photo (les passages de chaine n'ont pas été percés, ce sera fait après mise en place des barbotins et chaines).
J'ai encore du boulot pour le terminer mais il doit rouler avant le 22 septembre de cette année rouler ne veut pas dire finit. J'espère continuer dans cette voie et le terminer avant la fin de l'année sauf la nacelle pour la caméra (qui remplace l'APN prévue initialement).
La télécommande est partiellement modélisée et imprimée (enfin un proto vu la réussite de ma première impression 3D), j'avais du mettre des photos dans le sujet d'impression 3D.
Je rappel que je sui près à recevoir vos conseille pour la caméra du pilote.
Pas le moral
Re: Réalisation d\'un robot à chenilles
Sauf que pour le budget j'avais envisagé 2 à 3k€, j'ai fait découper des pièces au jet d'eau (ça coûte 2 bras ! ), j'ai fait découper des pièces au laser et j'ai fait usiner d'autres pièces, que je ne pouvais pas faire simplement découper, les 3 derniers blocs alu où sont logés les moteurs de propulsion m'ont coûté au total 1200€, le premier bloc avait été fait quelques temps avant pour être sûr qu'il n'y ait pas d'erreur et je jet 1800€ environs, et encore ce prix c'est parce que le gars est membre du forum de robot et m'a fait un prix sinon ça dépassait largement les 2500€.merlin2000fr a écrit : ↑lun. 7 sept. 2020 12:22 super projet
merci de le déterrer, j'ai suivi sans participer, n'ayant pas les compétences pour t'aider bien malgré moi.
pour le budget tu t'en sors pas si mal, j'en ai vu qui avait explosé les 100k€ entre le matériel d'usinage et les matériaux.
De même pour les bras j'ai du faire des sacrifices, la première version ne pouvais pas être découpées au laser parce qu'il y avait des nervures pour le renforcer mais pour usiner la plus grande des deux pièces du bras le gars me demandait environs 600€HT (prix sans réduc) et donc cela à multiplier par 4 (4 bras) et dans les 300 ou 400€ l'autre pièce, aussi à multiplier par 4, je me suis résolu à faire des pièces plus simples moins solide et moins belle pour les faire découper au laser, je ne sais pas si pour l'ensemble j'en ai eu pour 500€. Les bras reste assez solides puisque les deux pièces sont reliées entre elles prenant en sandwitch des plaque de PEHD pour le glissement et guidage des chenillettes. Dans ma conception j'ai tout de même prévu la place pour un renfort si nécessaire mais pour le moment la réalisation de ce renfort n'est pas prévue.
ça me coûterait moins chère si j'avais pu usiner mes pièces mais là je les fait faire par des pros.
Pas le moral
-
merlin2000fr
- Messages : 2140
- Inscription : ven. 12 janv. 2018 17:44
Re: Réalisation d\'un robot à chenilles
je suis admiratif du résultat, et de volume de travail indépendamment du budget, et pour un particuler je suis sur le cul la aussi sur la durée.
Remarque certain mette la meme chose pour faire leur SI maison durant le confinement pour ne pas trop etre dépendant de celui de leur boite difficile à tenir la charge des cnx en télétravail , c'est ce que j'ai fait ;p
donc chapeau bas a toi
Remarque certain mette la meme chose pour faire leur SI maison durant le confinement pour ne pas trop etre dépendant de celui de leur boite difficile à tenir la charge des cnx en télétravail , c'est ce que j'ai fait ;p
donc chapeau bas a toi
-
merlin2000fr
- Messages : 2140
- Inscription : ven. 12 janv. 2018 17:44
Re: Réalisation d\'un robot à chenilles
autre chose je vois les implications et usage future pour ton robot, coté secour au personne en terrain instable par exemple.
mais je suppose que tu as du deja y penser bien en amont.
reste a le tester sur le terrain avec un organisme qui serait prêt à jouer le jeu et te donner une chance par ce biais aussi de trouver un financement participatif ou des subventions...
mais je suppose que tu as du deja y penser bien en amont.
reste a le tester sur le terrain avec un organisme qui serait prêt à jouer le jeu et te donner une chance par ce biais aussi de trouver un financement participatif ou des subventions...
Re: Réalisation d\'un robot à chenilles
C'est plus pour de l'exploration de bâtiments à l'abandon, façon URBEX mais en plus sûr pour les personnes.
Certaines photos postées sur le forum de Robot Maker montre aussi les raisons de certains choix et aussi les abandons, notamment il y a un an et demi après l'annonce de ma maladie j'ai pété un câble et tout abandonné mais une fois l'annonce digérée et voyant tout ce matériel qui m'a coûté une fortune j'ai repris parce que s'il ne m'avait pas coûté aussi cher je l'aurais certainement abandonné, surtout que je finance tout avec mon petit salaire. J'ai voulu lancer un financement mais ça n'a pas été une réussite, j'ai obtenu que 50€ (que j'ai rendu puisque qu'à ce moment là ce n'était qu'une goutte d'eau pour continuer le robot).
Il a été prévu d'en faire un second, en impression 3D, pilotable par Internet via la plateforme Vigibot (désolé si vous considérez ça comme de la pub vous pouvez supprimer) pour essayer d'attirer du monde sur mon idée d'exploration mais ça n'a pas l'aire de marcher donc j'ai laissé tombé, il n'y avait rien de fait à l'exception d'une partie de la modélisation du châssis.
Actuellement sur ma page Facebook, ce qui suivent la construction de mes robots sont à 95% des Tunisiens (ça me fait plaisir de voir que ça touchent des gens hors de France), seuls deux ou trois membres de Robot Maker suivent ma page.
J'aimerais bien pouvoir visiter de magnifique château/manoirs à l'abandon, sans prendre de risque, l'an prochain. Il y a un autre engin qui est prévu pour aller dépanner celui-ci en cas de panne, s'il n'y avait pas eu une erreur dans mes plans pour la découpe laser (erreur vue une fois tout soudé), il serait capable de rouler aujourd'hui.
Certaines photos postées sur le forum de Robot Maker montre aussi les raisons de certains choix et aussi les abandons, notamment il y a un an et demi après l'annonce de ma maladie j'ai pété un câble et tout abandonné mais une fois l'annonce digérée et voyant tout ce matériel qui m'a coûté une fortune j'ai repris parce que s'il ne m'avait pas coûté aussi cher je l'aurais certainement abandonné, surtout que je finance tout avec mon petit salaire. J'ai voulu lancer un financement mais ça n'a pas été une réussite, j'ai obtenu que 50€ (que j'ai rendu puisque qu'à ce moment là ce n'était qu'une goutte d'eau pour continuer le robot).
Il a été prévu d'en faire un second, en impression 3D, pilotable par Internet via la plateforme Vigibot (désolé si vous considérez ça comme de la pub vous pouvez supprimer) pour essayer d'attirer du monde sur mon idée d'exploration mais ça n'a pas l'aire de marcher donc j'ai laissé tombé, il n'y avait rien de fait à l'exception d'une partie de la modélisation du châssis.
Actuellement sur ma page Facebook, ce qui suivent la construction de mes robots sont à 95% des Tunisiens (ça me fait plaisir de voir que ça touchent des gens hors de France), seuls deux ou trois membres de Robot Maker suivent ma page.
J'aimerais bien pouvoir visiter de magnifique château/manoirs à l'abandon, sans prendre de risque, l'an prochain. Il y a un autre engin qui est prévu pour aller dépanner celui-ci en cas de panne, s'il n'y avait pas eu une erreur dans mes plans pour la découpe laser (erreur vue une fois tout soudé), il serait capable de rouler aujourd'hui.
Pas le moral
Re: Réalisation d\'un robot à chenilles
Ce vous remets le post dans le sujet d'impression 3D
 depuis qu'une partie de la ligne déconne sinon avant c'était beaucoup de temps à tuer) et donc je vois la partie électronique à loger dedans pour pouvoir finir la modélisation et finir l'impression du prototype avant de la réimprimer (surtout la partie centrale qui est raté et aussi qui contient quelques élément dont je dois corriger l'emplacement).
depuis qu'une partie de la ligne déconne sinon avant c'était beaucoup de temps à tuer) et donc je vois la partie électronique à loger dedans pour pouvoir finir la modélisation et finir l'impression du prototype avant de la réimprimer (surtout la partie centrale qui est raté et aussi qui contient quelques élément dont je dois corriger l'emplacement).
J'utilise une Arduino Nano et une Uno + shield WIFI pour la télécommande, le Raspberry Pi est prévu pour la télémétrie mes je me demande si je ne devrait pas faire autrement surtout que le RPi était aussi prévu pour la caméra IP.
L'intérêt d'avoir une UNO + une NANO est d'étendre les entrées pour pas cher (j'avais un stock de NANO)
Le robot comportera une Arduino MEGA pour le pilotage et une Arduino Uno pour la télémétrie :
- température des moteurs
- consommation des moteurs (courant)
- le plus important : l'état des batteries
- la vitesse et le sens
- des capteurs environnementaux
- etc..
Certains de ces capteurs seront sur la MEGA parce qu'ils sont nécessaire au bon fonctionnement du robot et je dois avoir juste ce qu'il faut commen entrées analogiques pour brancher tous les capteurs dont j'ai besoin.
Malheureusement je n'ai plus de moteur (40rpm) pour la nacelle, j'ai utiliser celui que j'avais pour les bras afin de réduire mes dépense quand j'ai commander les autres moteurs, dans le même style de moteur j'ai le même que pour la propulsion (136rpm), je me demande si je ne vais pas l'utilise tout de même ou en commander un autre en 40rpm en même temps que je vais commander les moteur de propulsion de remplacement ( avec codeurs).
Je vais bientôt pouvoir avancer sur la partie mécanique, mes pièces sont usinées, demain matin je passerai voir s'ils sont ouvert (c'est sur ma route) sinon je vais les chercher mardi midi en débauchant.
Je n'arrive pas à utiliser l'écran LCD que j'ai acheté pour surveiller les batteries.
Depuis les choses n'ont pas beaucoup avancer (voir même pas du tout avancer) mais cette semaine j'ai repensé à la télécommande (j'ai un boulot avec parfois un peu de temps à tuerlevend a écrit : ↑dim. 22 sept. 2019 22:27 Bon, ma nouvelle imprimante 3D va attendre, j'avais oublié une chose, je viens de recevoir ma facture d'assurance voiture, le prix de l'imprimante 3D.
En plus de ça ma CR-10s est en panne et j'ai du commander des pièces que j'avais choisi au départ pour améliorer ma CR-10S, soit un nouveau système d'alimentation (ou extrudeur) avec un tube PTFE moins long qu'à l'origine, le seul kit Direct Drive que j'ai trouvé est bien trop cher, et un entrainement double pour l'extrudeur.
Je suis en train de me faire une télé commande pour mon robot avec le retour vidéo et toute la télémétrie, mais là je suis bloqué sans imprimante 3D.
L'impression n'était pas trop mal mais quand j'ai décollé les pièces ça ne s'est pas toujours bien passé, je vois plus ça comme un prototype qui va me permettre de corriger mes erreurs lorsque je referai ces pièces, j'ai également changé des paramètre d'impression qui devrait améliorer la qualité mais aussi doubler le temps d'impression.
HORRIBLE !!!
Il me reste à imprimer :
- le clapet pour le second écran et son articulation
- tout le dessous de la télécommande (en trois parties) avec le logement pour les récepteurs vidéo et les batteries
- la plaque à l'arrière du moniteur présent sur les photos, cette plaque servira aussi à supporter les cartes de contrôle des deux moniteurs.
Elle ne devait pas dépasser 4cm d'épaisseur pour les partie droite et gauche pour être bien tenue en main, malheureusement l'Arduino Uno et tous se shield dépasse et je n'ai pas envie de déplacer ses Shields (joystick, écran LCD de 4D Systems, wifi).
LEs vis tenant actuellement les 3 parties ensemble ne sont que provisoires, ils seront remplacés par un ensemble vis+écrous à anneaux pour accrocher le harnais (dommage celui que je voulais acheter au début n'est actuellement commercialisé que sur un site des émirats Arabes




J'utilise une Arduino Nano et une Uno + shield WIFI pour la télécommande, le Raspberry Pi est prévu pour la télémétrie mes je me demande si je ne devrait pas faire autrement surtout que le RPi était aussi prévu pour la caméra IP.
L'intérêt d'avoir une UNO + une NANO est d'étendre les entrées pour pas cher (j'avais un stock de NANO)
Le robot comportera une Arduino MEGA pour le pilotage et une Arduino Uno pour la télémétrie :
- température des moteurs
- consommation des moteurs (courant)
- le plus important : l'état des batteries
- la vitesse et le sens
- des capteurs environnementaux
- etc..
Certains de ces capteurs seront sur la MEGA parce qu'ils sont nécessaire au bon fonctionnement du robot et je dois avoir juste ce qu'il faut commen entrées analogiques pour brancher tous les capteurs dont j'ai besoin.
Malheureusement je n'ai plus de moteur (40rpm) pour la nacelle, j'ai utiliser celui que j'avais pour les bras afin de réduire mes dépense quand j'ai commander les autres moteurs, dans le même style de moteur j'ai le même que pour la propulsion (136rpm), je me demande si je ne vais pas l'utilise tout de même ou en commander un autre en 40rpm en même temps que je vais commander les moteur de propulsion de remplacement ( avec codeurs).
Je vais bientôt pouvoir avancer sur la partie mécanique, mes pièces sont usinées, demain matin je passerai voir s'ils sont ouvert (c'est sur ma route) sinon je vais les chercher mardi midi en débauchant.
Je n'arrive pas à utiliser l'écran LCD que j'ai acheté pour surveiller les batteries.
Pas le moral
Re: Réalisation d\'un robot à chenilles
Je vous remets ici la discussion que l'on a eu dans le topic Ping-pong :
levend a écrit : ↑mer. 2 sept. 2020 22:01 Pong
Sur mon robot qui a pas mal évolué depuis son début, je prévois de mettre une caméra IP pas cher pour le piloter et j'ai trouvé ça : https://www.gotronic.fr/art-camera-ip-f ... -32028.htm
Je me demande si je peux la voir sur un PC ou surtout sur un RPi. Ce n'est pas une super caméra mais pour moi c'est suffisant pour piloter le robot, le robot sera équipé d'une seconde caméra pour l'exploration mais ce sera une très bonne caméra avec stabilisateur (caméra pour drone) soit en Full HD soit en 4K.
Pas question de l'utiliser avec mon téléphone sous Android ni même une tablette, la télécommande du robot est équipée de deux écrans LCD (7" et 10"), l'un connecté au RPi et l'autre sera connecté à un récepteur vidéo (pour la caméra HD/4K).
augur1 a écrit : ↑mer. 2 sept. 2020 22:36 +1 et avec un rapsi4, tu pourras toujours bancher une autre cam avec le protocole montant
https://www.undergroundnews.dk/index.ph ... -streaming
Ngpi
levend a écrit : ↑jeu. 3 sept. 2020 21:06 PingJ'ai choisi une caméra IP filaire depuis que j'ai décidé d'embarquer un routeur, et j'ai choisit ce modèle parce qu'il était en première page du site quand je suis aller sur ce site pour autre chose et elle n'est pas chère. Je n'ai aucune autre raison de choisir cette caméra en particulier.
Je crois que vous ne m'avez pas compris, je ne peux pas relier la caméra directement au RPi puisque la caméra sera sur le robot et le RPi sera dans la télécommande.augur1 a écrit : ↑mer. 2 sept. 2020 22:36 +1 et avec un rapsi4, tu pourras toujours bancher une autre cam avec le protocole montant
https://www.undergroundnews.dk/index.ph ... -streaming
Ngpi
Si j'ai choisi une caméra IP filaire c'est pour la transmettre au RPI en WIFI via le routeur, la qualité doit être suffisante pour piloter le robot à distance et c'est tout pour faire des vidéos il y aura une caméra de bien meilleure qualité et ce sera probablement une seconde personne qui s'occupera de cette caméra.
augur1 a écrit : ↑jeu. 3 sept. 2020 21:42Entre le temps de latence, le protocole de stream et le Wifi... ça fait beaucoup de paramètre sensible.levend a écrit : ↑jeu. 3 sept. 2020 21:06 Je crois que vous ne m'avez pas compris, je ne peux pas relier la caméra directement au RPi puisque la caméra sera sur le robot et le RPi sera dans la télécommande.
Si j'ai choisi une caméra IP filaire c'est pour la transmettre au RPI en WIFI via le routeur, la qualité doit être suffisante pour piloter le robot à distance et c'est tout pour faire des vidéos il y aura une caméra de bien meilleure qualité et ce sera probablement une seconde personne qui s'occupera de cette caméra.
Tu risques de dépenser inutilement de l'argent et perdre beaucoup de temps pour avoir un piètre résultat.
Je trouve cela dommage, d'autant plus que je suis ton projet de robot depuis plusieurs années et j'ai hâte qu'il se concrétise !
nipg
poulpito a écrit : ↑ven. 4 sept. 2020 00:52 ahhhh bah te fait pas chier pour piloter matos de drone
ca coute plus rien l'analogique et la portée c'est en kmmême en indoor
runcam + vtx côté robot et rx + clef usb acquisition usb premier prix sur ebay et vlc sur le rpi et c'est finit
budget à la louche < 50€ et tu t'emmerde ni avec le wifi, ni avec le flux et tu porte bien mieux (sans compter que la cam est minuscule et a en plus sur certains très bonne vision de pénombre) et si le signal perd en puissance tu perdra pas d'un coup, l'image va se dégrader avant et ca c'est la bonne alerte
+ conso bien moins importante
enfin moi je ferai ca pong
levend a écrit : ↑ven. 4 sept. 2020 23:33 Ping
Je ne savais pas que mon robot était encore suivi ici sinon j'aurais un peu plus actualiser le sujet sur mon robot.
Si un modérateur/admin pouvait déplacer les posts à propos de la caméra dans mon sujet de robot, SVP, ce sera plus facile pour en discuter.
Je pensais revendre ma Runcam2 parce qu'elle ne répond pas à mes attentes, j'ai un gros problème au niveau de la portée lieux à l'utilisation que je veux en faire.
poulpito a écrit : ↑sam. 5 sept. 2020 00:45 déplacer non ca va couper des trucs mais reparle en la bas et je te montre les ref
biour te montrera vtxqu'on utilise en drone + recepteur USB branchable direct sur RPI et reconnu comme webcam
pong
Si vous avez des références je suis preneur parce que pour le moment je n'ai qu'une Runcam 2 et un petit émetteur que j'ai acheté sur Ali, je n'ose même pas dire ce que j'en pense, une idée : de la m...e !
Pas le moral
Re: Réalisation d\'un robot à chenilles
Je précise que pour le pilote je ne cherche pas du 4K ou du full HD mais une caméra et un émetteur (qui puisse passer à travers des murs de pierres) qui permettent au pilote de se diriger par un écran à distance.
Je précise que le robot embarque un routeur WIFI pour tout ce qui est télécommande et télémétrie, je sais que vous avez écarté les caméra IP mais je le précise tout de même au cas où ... mais aussi pour tenir compte des interférence possible avec l'émetteur vidéo.
Je précise que le robot embarque un routeur WIFI pour tout ce qui est télécommande et télémétrie, je sais que vous avez écarté les caméra IP mais je le précise tout de même au cas où ... mais aussi pour tenir compte des interférence possible avec l'émetteur vidéo.
Pas le moral

Re: Réalisation d\'un robot à chenilles
https://www.akktek.com/fx2-dominator.html
Avec un petit ventilateur. Et une bonne antenne.
Attention ne jamais faire fonctionner sans antenne.
Tu auras des kilomètres a pleine puissance (limite FR @25mw )
)
Avec un petit ventilateur. Et une bonne antenne.
Attention ne jamais faire fonctionner sans antenne.
Tu auras des kilomètres a pleine puissance (limite FR @25mw


Re: Réalisation d\'un robot à chenilles
et de l'autre côté branché à un RPI par exemple dans ta telco
https://www.amazon.fr/HankerMall-R%C3%A ... B075WPBWWV
le même genre que ca chez les chinois c'est prix /3 je pense ein biour te dira la bonne ref
https://www.amazon.fr/HankerMall-R%C3%A ... B075WPBWWV
le même genre que ca chez les chinois c'est prix /3 je pense ein biour te dira la bonne ref
Re: Réalisation d\'un robot à chenilles
Merci pour les références, vous n'auriez pas aussi une caméra à me conseiller ?
Les dernières grosses pièces sont arrivées, malgré un retard d'usinage de deux mois :

Les dernières grosses pièces sont arrivées, malgré un retard d'usinage de deux mois :
Pas le moral
Re: Réalisation d\'un robot à chenilles
J'étais en train de réfléchir mais je passais par le RPi parce que je prévoyais une caméra IP, donc en réalité je ne suis pas obligé de passer par le RPI, je pourrais très bien brancher directement sur le moniteur intégré à la télécommande, peut-être avec un autre récepteur.poulpito a écrit : ↑lun. 14 sept. 2020 18:59 et de l'autre côté branché à un RPI par exemple dans ta telco
https://www.amazon.fr/HankerMall-R%C3%A ... B075WPBWWV
le même genre que ca chez les chinois c'est prix /3 je pense ein biour te dira la bonne ref
Pas le moral
Re: Réalisation d\'un robot à chenilles
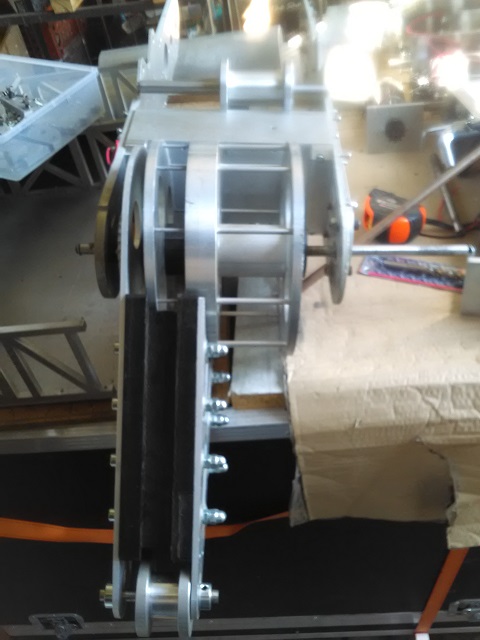
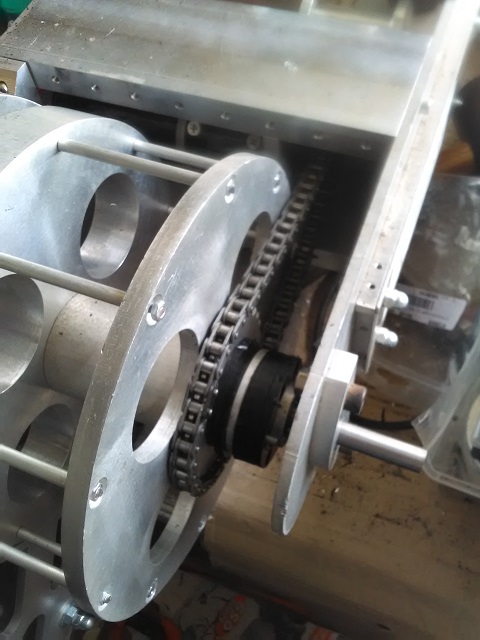
La motorisation est en bonne voie, j'ai commencer à mettre les chaines :
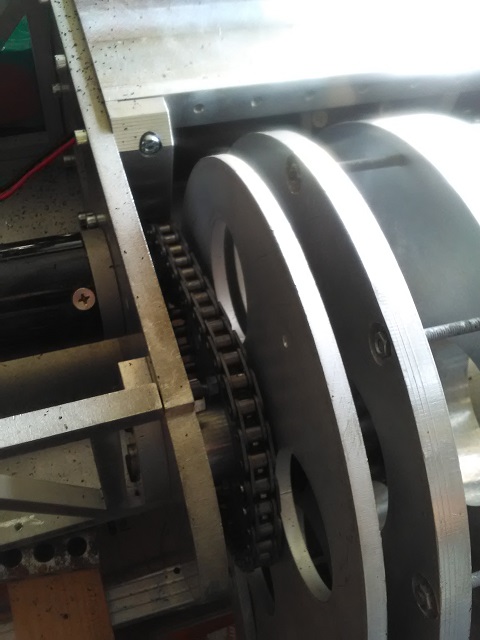
Les nouvelles chenilles sont presque prêtes :

Contrairement aux premières que j'avais acheté et montré ici, ces chenilles n'ont pas les tenons internes pour l'entrainement alors je les usine sur ma CNC et c'est un peu long (surtout si je me trompe dans les quantités ) :


C'est ce que je voulais réaliser à partir de chute de PEHD dans les plaques utilisées pour d'autres pièces su robot mais après l'accident qui ma valu deux semaines d'arrêt j'ai préféré prendre une plaque neuve et les usiner sur ma CNC.
L'obectif à atteindre était de le faire rouler avant lundi soir minuit, malheureusement il a fait trop chaud ces derniers jour et je ne suis pas aller dans mon atelier donc il y a très peu de chance pour qu'il roule lundi soir .
Les nouvelles chenilles sont presque prêtes :
Contrairement aux premières que j'avais acheté et montré ici, ces chenilles n'ont pas les tenons internes pour l'entrainement alors je les usine sur ma CNC et c'est un peu long (surtout si je me trompe dans les quantités
C'est ce que je voulais réaliser à partir de chute de PEHD dans les plaques utilisées pour d'autres pièces su robot mais après l'accident qui ma valu deux semaines d'arrêt j'ai préféré prendre une plaque neuve et les usiner sur ma CNC.
L'obectif à atteindre était de le faire rouler avant lundi soir minuit, malheureusement il a fait trop chaud ces derniers jour et je ne suis pas aller dans mon atelier donc il y a très peu de chance pour qu'il roule lundi soir
Pas le moral
Re: Réalisation d\'un robot à chenilles
https://www.helicomicro.com/2020/09/21/ ... range-vtx/
Voilà un émetteur un poil puissant
Voilà un émetteur un poil puissant
Re: Réalisation d\'un robot à chenilles
intéressant.
Comment as tu dimensionné les moteurs ?
Tu as des sources sur le sujet ?
Comment as tu dimensionné les moteurs ?
Tu as des sources sur le sujet ?
Re: Réalisation d\'un robot à chenilles
ça reste au dessus de la limite autorisée mais bon pour traverser des gros murs de pierres ...
J'ai pris du retard et je n'ai pas tenu les délais , mais j'espère atteindre mon objectif la semaine prochaine, ensuit je commande un émetteur.
Pour dimensionné les moteurs je me suis inspiré du mode de robot que j'avais choisi, j'ai pris les même moteurs même si mon robot est un poil plus grand que prévu : une erreur dans mes plans à fait que les chenilles du modèle se sont retrouvée 10 cm trop courtes (d'où les nouvelles chenilles).
J'ai trouvé quelques infos sur le modèle original dont des vu d'ensemble cotées (en pouces).
J'ai pris du retard et je n'ai pas tenu les délais
Pour dimensionné les moteurs je me suis inspiré du mode de robot que j'avais choisi, j'ai pris les même moteurs même si mon robot est un poil plus grand que prévu : une erreur dans mes plans à fait que les chenilles du modèle se sont retrouvée 10 cm trop courtes (d'où les nouvelles chenilles).
J'ai trouvé quelques infos sur le modèle original dont des vu d'ensemble cotées (en pouces).
Pas le moral
Re: Réalisation d\'un robot à chenilles
Avant de le jeter, j'aimerais savoir ce que vous pensez de ça : https://www.banggood.com/fr/Eachine-TX5 ... rehouse=CZ ?
J'avais acheté ça au mois de juin pour la RunCam 2 mais bon rien ne me convient (la Runcam2, le branchement de l'émetteur...).
Je prévois d'acheter la référence que biour m'a donné, surtout qu'il est plus puissant.
La construction du robot n'a pas respecté les délais, il ne roule pas encore et je dois démonter les bras des chenillettes pour les modifier, je pourrai tout de même le faire rouler puisque ces bras sont là uniquement pour aider à franchir les obstacles, en particulier les escaliers. Je dois couper les chenilles et poser les agrafes, ce qui est le plus délicat, ensuite je dois mettre une chaine pour relier le moteur à la deuxième chenille et ensuit il n'y a plus qu'à brancher le moteur sur une source de courant en 24V DC, mes batteries n'étant pas chargées (il faudrait peut-être queje vérifie la tension mais depuis le temps que je les ai ...).
D'ailleurs vous ne connaissez pas un endroit ou je pourrais acheter des batteries 24V NiMH (5000mAh ou 10000mAh), en France, voire en Europe puisque l'expédition ne se fait plus par avion, j'ai récemment du retirer ces batteries de ma commande à l'endroit où j'avais acheté les premières.
Je cherche des 5000mAh pour la partie électronique du robot et j'utilise des 10000mAh pour les moteurs. Les batteries sont en parallèle bien sûr mais elles ne seront jamais toutes en même temps, j'en garde au moins une pour pouvoir ressortir le robot quand les autres batteries seront à plat et les batterie pour l'électronique pourront aussi servir de batterie de secours pour les moteur mais seulement en dernier recours. Le mois prochain je commande une plaque époxy cuivrée pour essayer de réaliser le circuit, sur ma CNC, de la carte qui va gérer les batteries, il me faudra juste un relais supplémentaire mais ce sera pour plus tard.
J'avais acheté ça au mois de juin pour la RunCam 2 mais bon rien ne me convient (la Runcam2, le branchement de l'émetteur...).
Je prévois d'acheter la référence que biour m'a donné, surtout qu'il est plus puissant.
La construction du robot n'a pas respecté les délais, il ne roule pas encore et je dois démonter les bras des chenillettes pour les modifier, je pourrai tout de même le faire rouler puisque ces bras sont là uniquement pour aider à franchir les obstacles, en particulier les escaliers. Je dois couper les chenilles et poser les agrafes, ce qui est le plus délicat, ensuite je dois mettre une chaine pour relier le moteur à la deuxième chenille et ensuit il n'y a plus qu'à brancher le moteur sur une source de courant en 24V DC, mes batteries n'étant pas chargées (il faudrait peut-être queje vérifie la tension mais depuis le temps que je les ai ...).
D'ailleurs vous ne connaissez pas un endroit ou je pourrais acheter des batteries 24V NiMH (5000mAh ou 10000mAh), en France, voire en Europe puisque l'expédition ne se fait plus par avion, j'ai récemment du retirer ces batteries de ma commande à l'endroit où j'avais acheté les premières.
Je cherche des 5000mAh pour la partie électronique du robot et j'utilise des 10000mAh pour les moteurs. Les batteries sont en parallèle bien sûr mais elles ne seront jamais toutes en même temps, j'en garde au moins une pour pouvoir ressortir le robot quand les autres batteries seront à plat et les batterie pour l'électronique pourront aussi servir de batterie de secours pour les moteur mais seulement en dernier recours. Le mois prochain je commande une plaque époxy cuivrée pour essayer de réaliser le circuit, sur ma CNC, de la carte qui va gérer les batteries, il me faudra juste un relais supplémentaire mais ce sera pour plus tard.
Pas le moral
Re: Réalisation d\'un robot à chenilles
Oui je connais le eachine, sympa pour le prix. (J'en ai deux qui traine).
Pour les branchements, c'est normal, il n'y a rien de normalisé, donc soit tu recable soit tu soude directement.
Que reproche tu a la runcam2 ?
Pour les batteries pourquoi du NiMH ? Et pas du Lipo en 6S?
Pour les branchements, c'est normal, il n'y a rien de normalisé, donc soit tu recable soit tu soude directement.
Que reproche tu a la runcam2 ?
Pour les batteries pourquoi du NiMH ? Et pas du Lipo en 6S?
Re: Réalisation d\'un robot à chenilles
J'aime pas les objets où tu ne peux rien faire sans le connecter en WIFI à ton portable.
Il y a environs 10 ans j'ai acheté ses premières batteries, c'était du NiMH et j'aime bien en plus c'est moins problématique que les Lipo. La différence de prix ne justifie pas la différences de perfs, j'ai besoin de batteries qui supporte la charge assez longtemps, ce ne sont pas de petits moteurs sur le robot : (4 moteurs de propulsion, 4 moteur d'articulation, 1 moteur pour l'élévation de la nacelle, la caméra du pilote et son PAN &TILT et certainement aussi la caméra d'exploration avec stabilisateurs et zoom optique. Il y aura de quoi alimenter sans oublier le routeur mais lui sera peut-être sur la même batterie que l'électronique de commande.
Pas le moral
Re: Réalisation d\'un robot à chenilles
Ah bha prend des Runcam ou Foxxer qui ont une telecommande mais n'enregistre pas.
et pour les batteries, ok je comprend
et pour les batteries, ok je comprend
Re: Réalisation d\'un robot à chenilles
Comme si ça ne suffisait pas que la vidéo soit raté, Youtube me mets la vidéo à l'envers (la tête en bas)
Il aura rouler avec deux semaine de retard sur l'objectif. J'avoue que pour être sûr de tenir les délais je n'avais pas préciser comment il devait rouler mais je suis vraiment déçu de ne pas avoir pu le faire rouler avec les moteurs.
Il y a une autre vidéo où il descend du flightcase sur une rampe faite maison mais la vidéo a besoin d'un peu de montage pour être "visionnable".
Je laisse de côté la partie mécanique du robot, mis à part la recherche d'une solution pour l'usinage des pièces alu des bars qui sont à modifier, parce que j'ai des choses plus importante à faire comme par exemple la réparation de ma voiture qui devrait me prendre au moins la fin de la semaine, surtout que ça fait 3 ou 4 semaine qu'elle est cassée (c'est juste le remplacement du hayon sur mon Espace 3).
Biour, tu me conseillerais quelle caméra sachant je prévois d'acheter l'émetteur que tu m'as indiqué ?
Pas le moral
Re: Réalisation d\'un robot à chenilles
tu veux faire quoi avec?
inclure? ou juste un retour video?
si oui en ce moment jutilise des Foxeers
https://www.drone-fpv-racer.com/recherc ... it_search=
inclure? ou juste un retour video?
si oui en ce moment jutilise des Foxeers
https://www.drone-fpv-racer.com/recherc ... it_search=
-
augur1
- Messages : 13167
- Inscription : ven. 12 janv. 2018 17:44
- Localisation : où tout est neuf et tout est sauvage
- Contact :
Re: Réalisation d\'un robot à chenilles
Tu pourras m'en dire davantage / faire un kit emission & reception adaptée ?biour a écrit : ↑ven. 2 oct. 2020 16:43 tu veux faire quoi avec?
inclure? ou juste un retour video?
si oui en ce moment jutilise des Foxeers
https://www.drone-fpv-racer.com/recherc ... it_search=
Re: Réalisation d\'un robot à chenilles
Bha c'est ce que poulpi et moi (& autres) utilisons pour les drones.augur1 a écrit : ↑sam. 3 oct. 2020 22:35Tu pourras m'en dire davantage / faire un kit emission & reception adaptée ?biour a écrit : ↑ven. 2 oct. 2020 16:43 tu veux faire quoi avec?
inclure? ou juste un retour video?
si oui en ce moment jutilise des Foxeers
https://www.drone-fpv-racer.com/recherc ... it_search=
Donc du 5.8Ghz en analogique, si tu veux du numeriques regarde chez DJI, mais 800€ (au lieu de 80€).
sinon en gros il faut:
Un VTX (20-50€)
Une Camera (20-50€)
Une Paire d'antenne (20-50€)
par contre, il te faudrait une licence radio amateur si tu dépasse les 25mW